Yilong Chen
Publications
Teaching
Experience
Projects
建築士: 神に代わって風景を作ることを許された唯一の人
PhD Student in Robotics & Intelligent Construction Automation Lab (RICAL) at Georgia Tech
Follow
Atlanta, GA
Georgia Institute of Technology
Email
Google Scholar
Github
LinkedIn
Projects
Dynamic Object Detection and Tracking using LiDAR SLAM
Robot Imitation Learning for Autonomous Social Navigation
Camera and LiDAR Fusion for Dynamic Object Detection
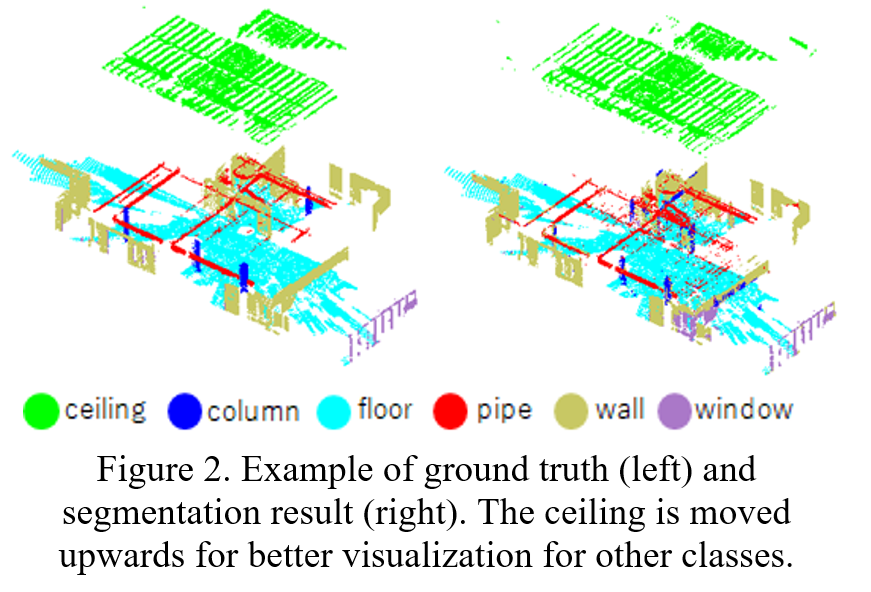
Reconstructing Piping Systems on Class-imbalanced 3D Point Cloud